The very first robot
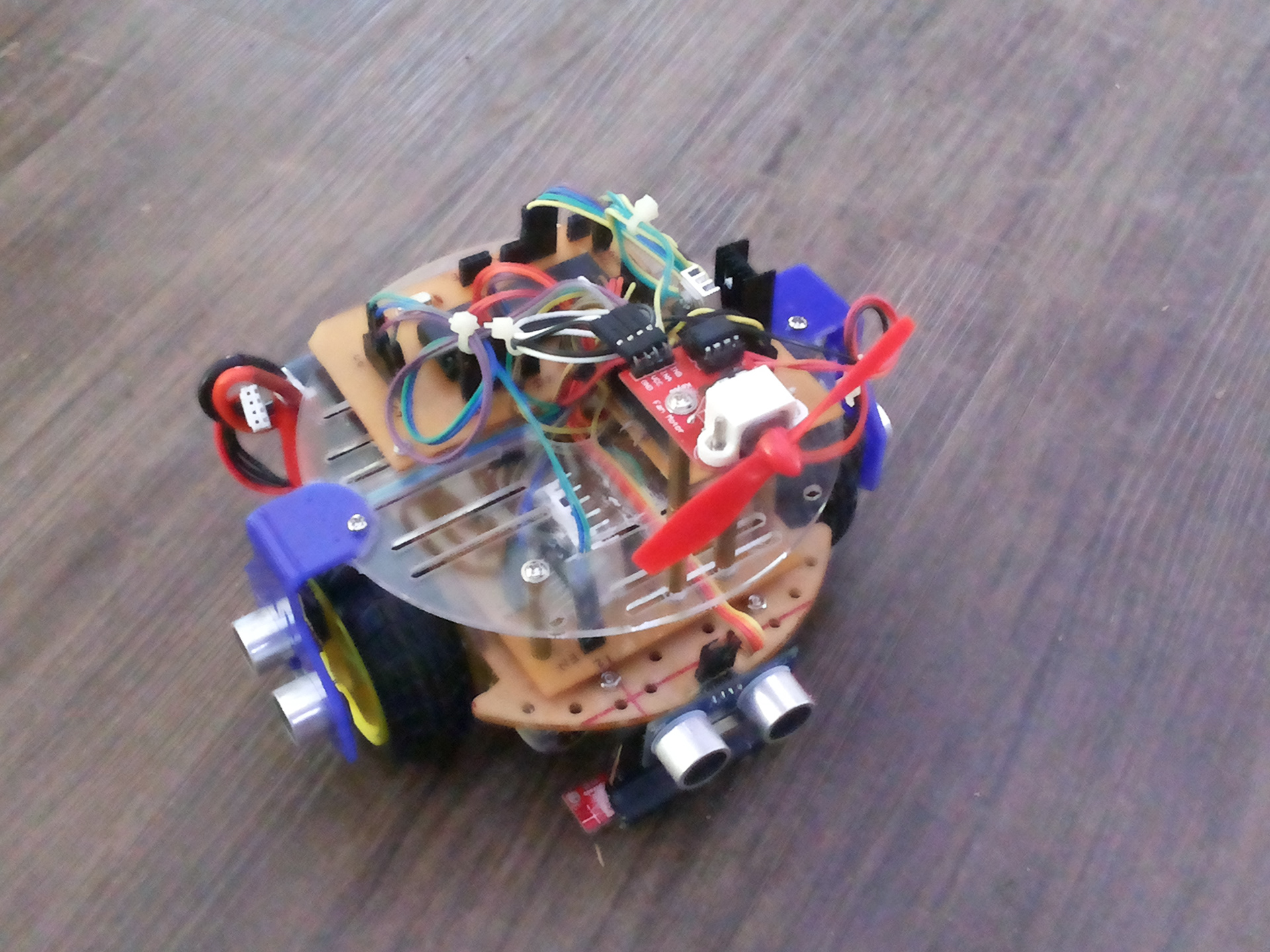
This robot was designed as a course project during my bachelor's program. The task was to follow a tree-like white line and blow out all the candles at the end of each leaf if there was a candle.
The robot had two printed circuit boards (PCB) where one board held the ATmega chip and the other held some MOSFETs as motor drivers. The PCBs were designed and printed by ourselves. It had 3 sonar sensors to detect candles, an LDR sensor array at the bottom to detect the white line and two motors to drive the robot and one fan to blow out the candle.
The control logics were developed by using C language.
maze solving robot
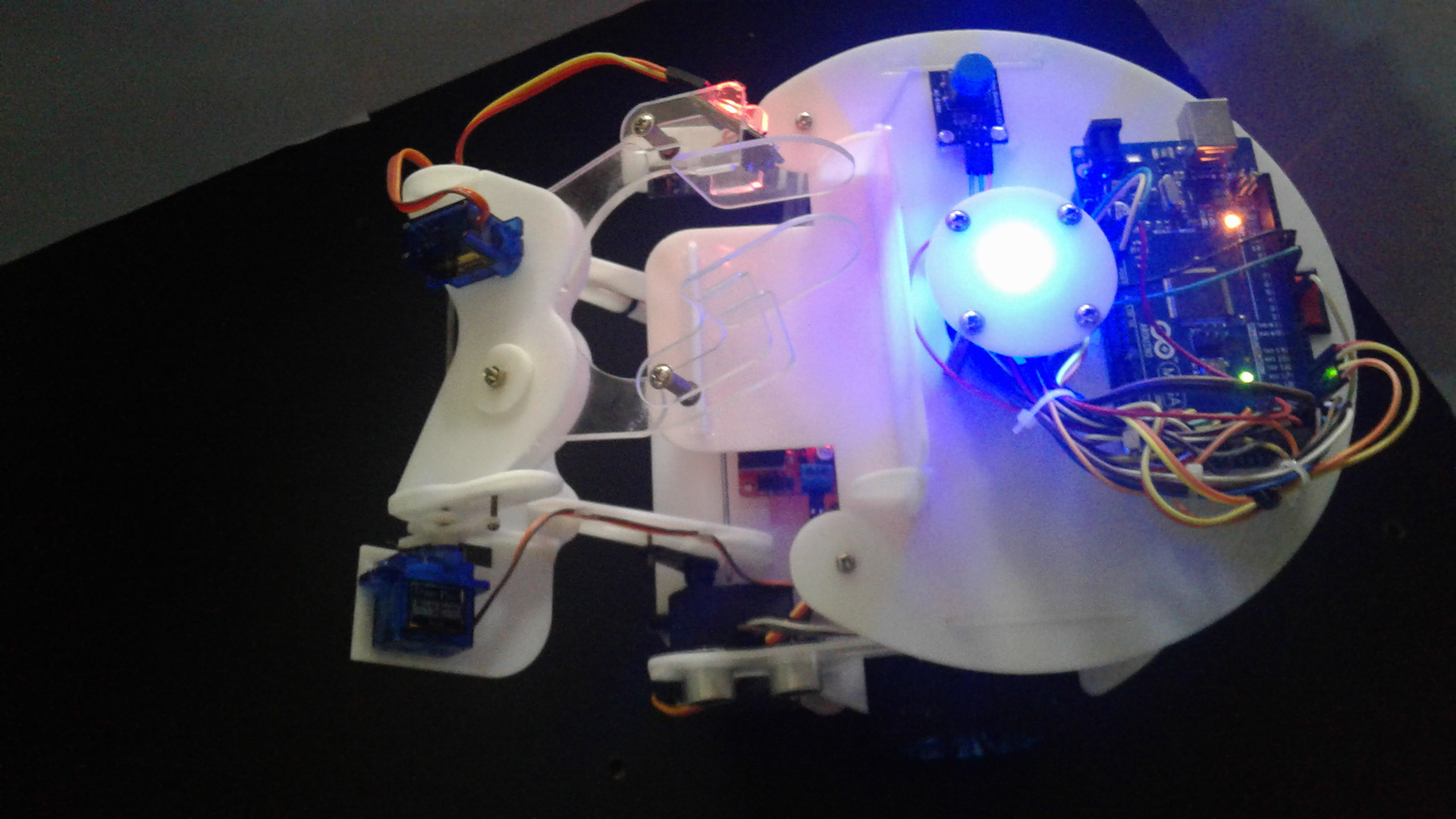
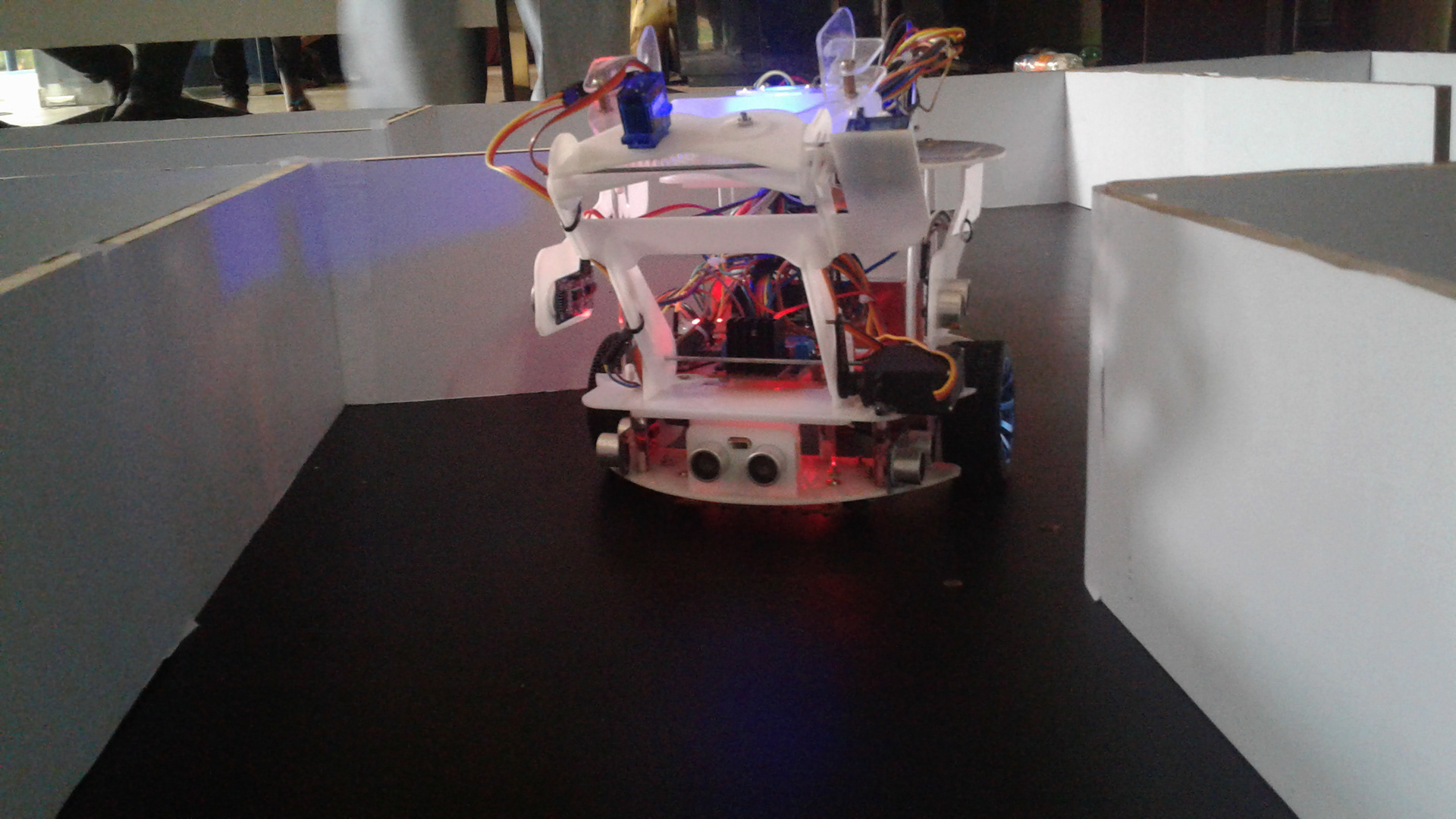
The maze-solving robot was also designed as a port of course project during my bachelor's. It maps a maze in the first run and solves for the optimal path from start to the end then in the second run, it grabs a box placed in a random place of the maze and delivers it to the end.
This robot had 5 sonar sensors to detect walls and the box, an arm that was operated using server motors, an Arduino Uno as the control unit and a motor driver PCB. The control logic was implemented by using Arduino language.
Enter to the competition


While my interest in robotics grew, I was invited by fellow colleagues to enter a robotics competition conducted by the university. Other universities were also invited and participated in the event.
Two robots were coordinated together where one robot is automated and the other robot is remotely controlled. The task consisted of shooting balls grabbing obstacles and placing them and so on.
We won the runner-up!